
Osiflow HMI Demo at the Claude Delhi Meetup - The Design Problem Every Robotics Builder Recognized
Osiflow HMI was demoed at the Claude community meetup in Delhi alongside physical AI agents, pre-commit pipelines, and robotics tooling. Before the solution landed, the problem did. Designers and developers in the room had all hit the same wall: robot specs, ROS node graphs, and machine jargon with no design vocabulary to translate any of it. This is what that room looked like.

Category
Community
Date
Reading Time
5 mins
TLDR by Avaline
Osiflow HMI was demoed at the Claude community meetup in Delhi alongside physical AI agents, pre-commit pipelines, and robotics tooling. Before the solution landed, the problem did. Designers and developers in the room had all hit the same wall: robot specs, ROS node graphs, and machine jargon with no design vocabulary to translate any of it. This is what that room looked like.
The Room
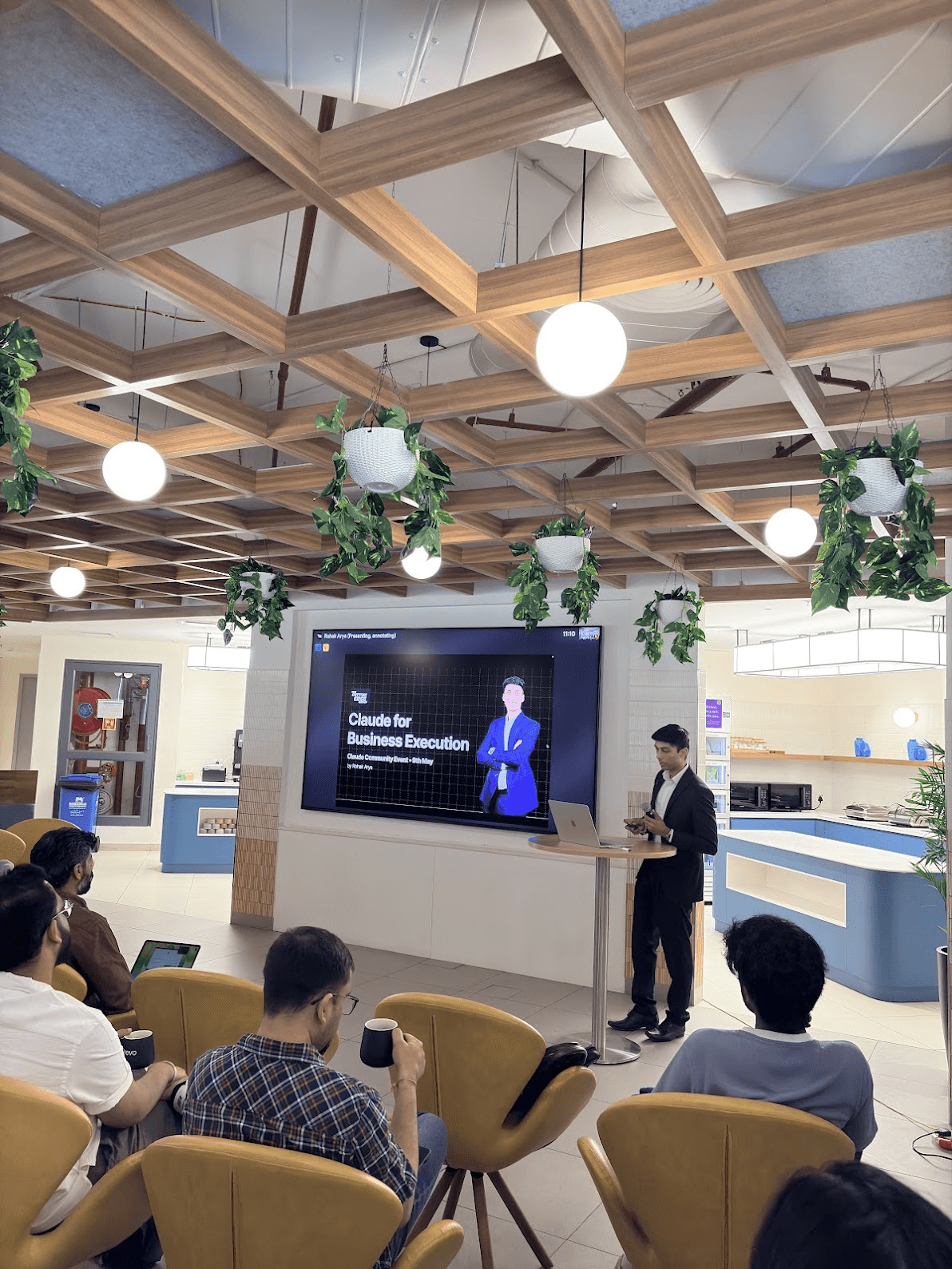
The Claude demo day, centred around Anthropic, was organised in Delhi on May 10th by Shubhangi (check out her post), Vipul (check out his work) & Shivay. Three of the people are actively building the Claude community in New Delhi. I, Shreshth, gave the live demo of Osiflow HMI at the event.
1400 people registered, & 90 were handpicked. The room had developers, designers, and builders. From senior practitioners to college students. People who write code, ship interfaces, and build tools for a living. The kind of event where the demos are the conversation, not a backdrop to them.

The presentations were the real thing, not slides about what teams plan to build.
Rohak from Cutting Edge School opened and walked through using Claude Connectors to automate daily lead workflows end to end. A live demo of practical automation that immediately translates to the way teams prospect and follow up.
Esan Mohammad showed how to collapse multirepo context into a runnable sandbox preview. The kind of tooling that changes how long it takes to go from reading unfamiliar code to running it.
Nagendra Kumar ran a live pre-commit code review pipeline built entirely on Claude Code. A workflow that runs before code is committed, not after. The difference between catching a problem in two seconds and catching it in a PR review three days later.
Harshvardhan & his teammate from Addverb talked about running Claude Code like an engineering org, not a solo vibe-coding session. The operational discipline behind agentic AI at team scale.
Khushi from Cyberwave showcased how to build physical AI agents that operate real hardware through Claude Code. Cyberwave is building the operating layer between AI models and real machines, abstracting hardware into programmable digital twins. They have raised €7M to do exactly this.
Shubhangi's talk, "Nobody Saw It, So It Didn't Happen," was about using Canva with Claude to document and share work that otherwise disappears. If a workflow improvement isn't visible, it doesn't compound. The point landed.
Harshit talked about Brevo, the office where the event was hosted. Who was also followed by another speaker.
Great to reconnect with Daanesh Bhathena, Creative Head at Ansh Mehra Creations and fellow ex-FlytBase. Good to meet Aum from his team too. Also caught up with Shivangini, who was once a part of Osiflow (agency side of the org) for a short while. You want those names in the same room when the conversation turns to AI and design.
The Problem That Found Its Audience
Then, I got the floor. Presented Osiflow HMI, the last demo of the day.
I started with the problem, not the product. A designer joins a robotics team. Day one, they get a ROS node graph, a 60-page system architecture document, and machine specs dense with coordinate notation, joint limits, and mode-state tables. The goal is to design the interface that lets a human control that machine safely. There is no component library for any of it. No established pattern for what "fault recovery in progress" looks like on screen. No agreed visual language for manual override, emergency stop, or telemetry hierarchy. No vocabulary, the way there is for loading states, error messages, and empty states in consumer software.
The designer invents it. Then the next designer on the next project invents it again. Every team rebuilds the same 15 patterns independently, on every robot, on every deployment, from scratch.
Designing a robot's interface without shared vocabulary is like building a bridge from both ends without agreeing on the units.
This isn't only a designer's problem. It compounds. When a robot fails in a live warehouse and the interface surfaces raw telemetry, the operator's cognitive load spikes. Deciphering machine state under pressure, with no visual hierarchy built for that moment, is the gap between a correct response and a hesitation. The design infrastructure that should absorb that cognitive load doesn't exist yet in robotics.
The room nodded. Developers and designers in a Claude community meetup immediately recognised the wall. Not because they all work in robotics. Because the gap between how a system is built and how a person has to interact with it is a problem they all had hit in some form, on some project, during some kind of stack handoff.

The Demo
Osiflow HMI is a design system built from the ground up for the control interfaces that sit between robot behaviour and human decision. Patterns for emergency stops, fault recovery states, manual override, mission controls, telemetry display, operator logs, robot identity cards, and fleet overviews. Every component a designer would otherwise build from scratch for each new robot they work on. A semantic token system designed for physical system states, not consumer UI. Design principles derived from real operator deployments.
It gives a designer the vocabulary to start from on day one. For founders, it compresses the onboarding gap. The design industry has built vocabularies for every major UI paradigm. SaaS. Mobile. E-commerce. Machines are next.
The questions after the demo were the signal I needed. People working on warehouse automation, collaborative robots, and inspection systems immediately mapped it onto their own gaps. Companies like Addverb Technologies, which just showcased ELIXIS-W, their made-in-India humanoid robot, to clients including Amazon and Flipkart, are the context this design system was built for. The control interface problem is not theoretical when a robot is moving a 10 kg payload in a live warehouse at 1.5 metres per second.
What's Next
The design infrastructure for physical AI is missing. That isn't an opinion. It is what every team in that room is rebuilding independently, on every project, at full cost. Osiflow HMI is building it once.
Datum, our pattern library for robotics control interfaces, is on its way. The community that showed up for the first demo will be the first to use it.
-
Join the early access list for Datum v1.0. Want to see Osiflow HMI in action?